
Page 8 - Matemáticas para bacharelato de adultos
P. 8
8
2. Magnitudes escalares e vectoriais
Prácticas
Para os fins da xeometría analítica engadirase, ao concepto de xeométrico de segmento, a idea de sentido ou dirección.
Dende este punto de vista considerarase que o segmento AB é xerado por un punto que se move ao largo da recta r de
A cara B , e indícase iso cunha frecha, como se ve na figura.
• Neste caso dirase que o segmento AB está dirixido de A a B .
• O punto A chámase orixe e o punto B recibe o nome de extremo ou punto final.
• Podería obterse o mesmo segmento dirixíndoo de B cara A ; entón B é a orixe e A é o extremo, e o segmento
desígnase por BA.
Dende o punto de vista da xeometría elemental, as lonxitudes dos segmentos dirixidos AB e BA son as mesmas. En
xeometría analítica, sen embargo, faise unha distinción entre os signos destas lonxitudes.
• Así, especificamos, arbitrariamente, que un segmento dirixido nun sentido será considerado de lonxitude positiva,
mentres que outro, dirixido en sentido oposto, será considerado como un segmento de lonxitude negativa.
• De acordo con isto, se especificamos que o segmento dirixido AB ten lonxitude positiva, entón o segmento diri-
xido BA ten lonxitude negativa, e escríbese
AB = − BA
2. MAGNITUDES ESCALARES E VECTORIAIS
Hai magnitudes tales que os seus valores poden representarse por números positivos ou negativos, que se chaman esca-
lares (ou magnitudes escalares), como poden ser la temperatura, a masa, o traballo, etc. e outras magnitudes que se
determinan tanto polas súas dimensións, como polas súas direccións no espazo (ou no plano), e que se chaman vecto-
riais, como poden ser a forza, a velocidade, a aceleración, a intensidade dun campo eléctrico ou dun campo magnético,
etc. e poden representarse por vectores.
3. VECTORES NO PLANO
Un vector é un segmento que ten unha lonxitude determinada, unha dirección e un sentido. Represéntase por AB , onde
A representa a orixe e B representa o extremo, ou por a .
• A lonxitude do vector chámase módulo do vector (ás veces tamén recibe o nome de valor absoluto), e represén-
tase entre barras verticais, por exemplo a . A dirección do vector é a da liña que contén o vector e o sentido é o
do recorrido que vai de A a B.
• Un vector fixo ou ligado está determinado polo seu módulo, dirección, sentido e punto de aplicación.
• Un vector nulo ( 0 ) é un vector tal que o seu extremo e orixe coinciden; o seu módulo é igual a cero e a súa direc-
ción é indeterminada.
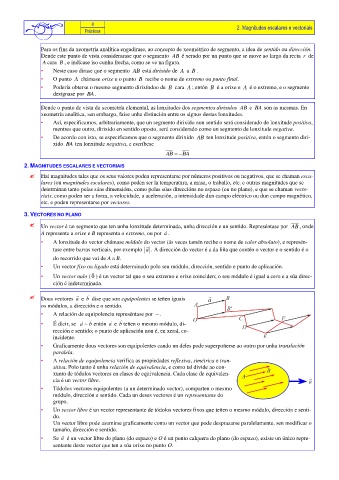
Dous vectores a e b dise que son equipolentes se teñen iguais
os módulos, a dirección e o sentido.
• A relación de equipolencia represéntase por .
• É dicir, se a b entón a e b teñen o mesmo módulo, di-
rección e sentido; o punto de aplicación non é, en xeral, co-
incidente.
• Graficamente dous vectores son equipolentes cando un deles pode superpoñerse ao outro por unha translación
paralela.
• A relación de equipolencia verifica as propiedades reflexiva, simétrica e tran-
sitiva. Polo tanto é unha relación de equivalencia, e como tal divide ao con-
xunto de tódolos vectores en clases de equivalencia. Cada clase de equivalen-
cia é un vector libre.
• Tódolos vectores equipolentes (a un determinado vector), comparten o mesmo
módulo, dirección e sentido. Cada un deses vectores é un representante do
grupo.
• Un vector libre é un vector representante de tódolos vectores fixos que teñen o mesmo módulo, dirección e senti-
do.
Un vector libre pode asumirse graficamente como un vector que pode desprazarse paralelamente, sen modificar o
tamaño, dirección e sentido.
• Se u é un vector libre do plano (do espazo) e O é un punto calquera do plano (do espazo), existe un único repre-
sentante deste vector que ten a súa orixe no punto O.